![]()

分辨率表示识别物体上两个相邻点的最小尺寸。本目录原则上以可见光的中间波长550nm的理论分辨率进行标示。分辨率=0.61×λ/NA
可在1mm内识别多少黑白条纹的尺度。
例如:100条/mm代表可以识别10μ的黑白间距,因此黑白线条的宽度分别为5μ。
可在电视机屏幕水平方向识别的等宽黑白条纹的总数量。相对于光学分辨力是将1组黑白线视为1条线计算,而水平分辨率则是将黑白线分别算为1条线,因此水平分辨率100线就是黑白各50线。
例如:使用水平分辨度470条TV线条的1/2CCD(水平尺寸6.4mm)时,所需分辨力为1mm÷(6.4mm/(470÷2))=36.72条/mm。
表示镜头的光轴中心部分和周边部分的亮度差异。中心部最亮的部分表示为100%。通常视角(视野)越大孔径效率就会越低。
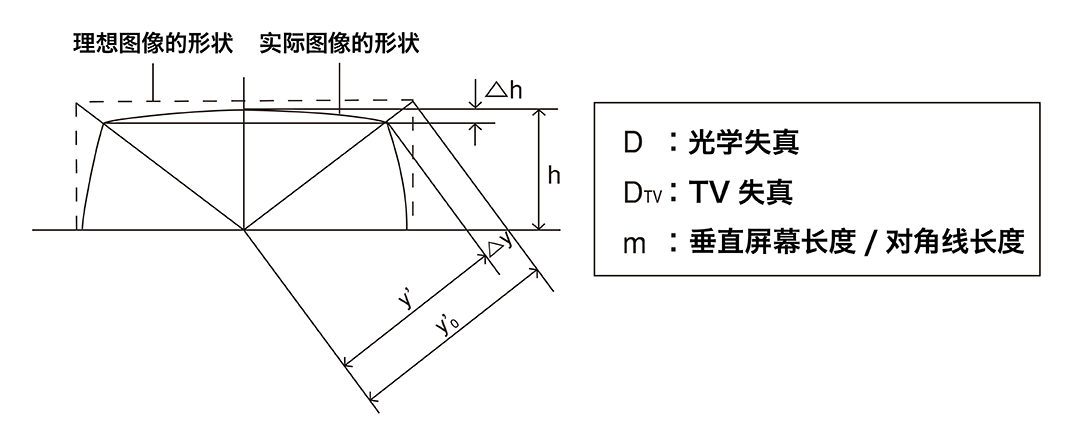
光学失真
由于两面图像的外侧收缩或拉伸,导致本来笔直的线产生歪曲,这个现象被称为失真。目录中的数值表示理想图像与实际图像的对角线尺寸差相对于理想图像的对角线尺寸的百分比。

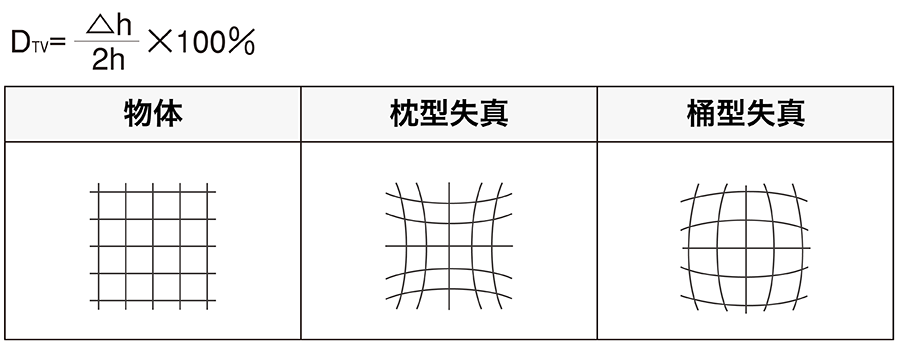
TV失真
TV屏幕上的图像失真,是表示图像长边方向上失真的数值。
通过镜头使用CCD相机、TV屏幕观看时,屏幕中心和边缘的亮度差异。颜色的中心和边缘之间的差异或流动被称为色彩偏差。
光学系统的成像位置取决于光的波长。用白光拍摄时,不同波长的光线会入射进来,容易发生颜色模糊等现象,对分辨力产生影响。光轴上的现象被称为轴向色差,而横向边缘方向的模糊则被称为倍率色差。
这是表示镜头亮度的数值,由镜头的焦距除以入射瞳直径(D)计算得出。使用焦距无限远镜头时,可以简单地将最前面的镜片直径代替入射瞳来直径进行计算。F No. = f/D
该数值为表示有限距离内的光学系统亮度的FNO。实际使用时如果乘以光学倍率(M)使用,则亮度会变暗,数值也会变大。
有效FNO=(1+M)×FNO
该数值越高物体越亮,在显微镜的物镜等下的分辨力就越好。在折射率为n的介质中,光轴上的物点相对于入射瞳半径的角度称为u’,而折射率n’时,n’×sin u’就叫做像侧数值孔径NA’。目录中记载的数值是指物体侧数值孔径NA。

在有限距离的情况下,与实效F相关,通过NA=M/2xF、A’=1/2xF计算得出。在有限距离的情况下,与实效F相关,通过NA=M/2xF、A’=1/2xF计算得出。
表示光学系统分辨度的数值。将在黑白分辨力测试卡上测量时的对比度量化的数值。
是指将像侧的成像面前后移动时图像基本清晰的范围。
连接第2主点与成像部分(图像)的两条光线的角度称为视角。即使是相同焦距的镜头,视角也会随着图像格式的改变而改变。在相同焦距下,CCD尺寸越大,视角越宽,而CCD尺寸越小,视角就越窄。
视角=2×tan-1D(图像尺寸)/2f(焦距)
被拍摄体在最佳对焦位置前后移动时图像会产生“模糊”,该“模糊”在实用允许范围内可接受的大小称为可接受的弥散圆。在“模糊”不超过可接受的弥散圆直径的条件下,被拍摄体高度方向上允许移动的范围称为景深。在使用CCD的拍摄系统中,相机和屏幕的分辨力(转换为1 bit的数值)是极限数值,因此即使是相同的镜头,景深的数值也会根据所使用的系统而变化。
景深=2(可允许的弥散圆直径×有效FNO/倍率2)
镜头镜筒前端到物体的距离
物体到成像面(图像传感器)的距离
从光学系统的主点到焦点的距离称为焦距。所有光学系统都要基于此焦距考虑倍率等进行设计。
可用成像部分的大小。区域传感器以英寸为单位表示尺寸,像圈的直径对应传感器的对角线尺寸。线传感器的像圈直径直接就是最大匹配图像尺寸,以1个像素的尺寸×像素数表示。本目录中的光学系统专门针对区域传感器和线传感器的图像格式设计。
